特長
プラチナマエストロは、ELMO最新世代のモーションコントローラです。
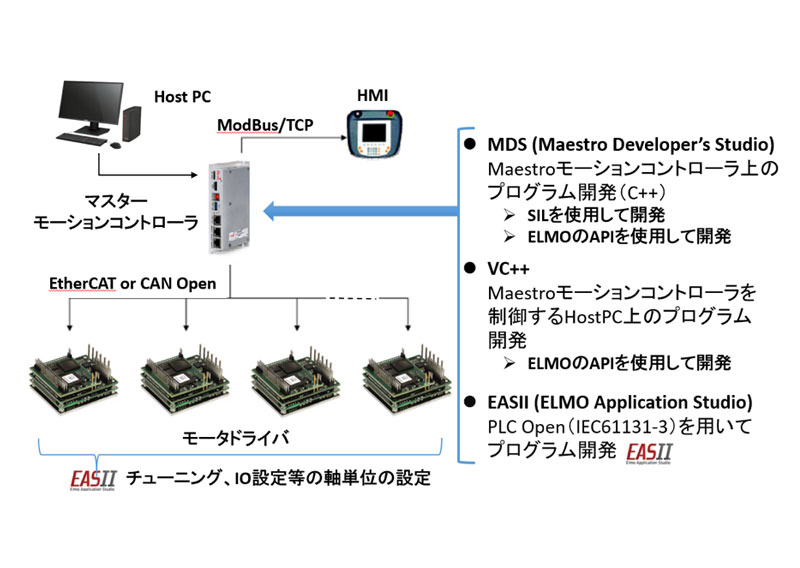
EtherCATまたはCANOpenネットワークマスターとして、多軸同期制御が可能です。
- EtherCAT, CANOpenベースのコントローラ
- 最大100軸まで制御
- サイクルタイム 100us (8軸)*最新世代プラチナシリーズドライバ使用時
- ネットワーク標準
・DS-301, DS-402, DS-406, その他モーション規格 - プログラミング環境
・IEC61131-3(PLCopen), .NET and Win32 C++(Host PC), GNU C/C++(Maestro上プログラム) - 強力な統合開発環境 ”EASII”と“MDS“ が、効率の良いプログラム開発をサポート
- オンボードIO(オプション):DIO 12in/8out, アナログIO 4in(差動)/4out
開発環境ELMO Application Studio(EASII)機能
ELMOユーザーに無償提供される開発環境です。
- ネットワーク設定
- チューニング:オート、エキスパート(ボード線図、ニコラス線図)
- パラメータ設定
- IO設定
- モーションプログラミング:PLC Openに基づくプログラミング
- レコーダ/モニタ
- パスシミュレータ
- SIL(Software In the Loop):ユーザーアルゴリズム実装機能
モーションプログラミング
Software In the Loop機能で独自の制御アルゴリズムを組み込み可能
SIL機能を使えば、自身で開発・テストしたリアルタイムアルゴリズム・運動方程式/逆運動方程式をモーションコントローラ“プラチナマエストロ”に組み込むことが出来ます。
- Matlab・SimulinkもしくはC++コードを組込み
- ELMOの開発環境(MAESTRO Developer Studio)、.net環境にてビルドし組み込み
- プロセスデータ、変数にアクセスする特別なAPIも用意
- 直交軸、スカラ、デルタ、垂直多関節タイプでのELMOからのノウハウ提供も可能
- 100us(8軸)、250us(16軸)のリアルタイム同期制御
- CSP、CSV、CSTモードに対応
| 型番 | ファンクション |
|---|---|
| P-MAS0N | パネルマウント、電源12-31VDC |
| P-MAS0I | パネルマウント、電源12-31VDC、IECライセンス |
サポート
- 開発環境(EASII)使用方法のサポートを致します。デモが可能です。