超小型モータドライバ
超小型モータドライバ
モータドライバを超小型化することにより、モータドライバをロボットアクチュエータ内部もしくはアームの中に格納することが可能となります。
大型の制御ボックスが不要となり、ロボットアームとコントローラのみでロボットシステムを構成できます。
- DC電源(10Vdc~194Vdc)で駆動可能です。
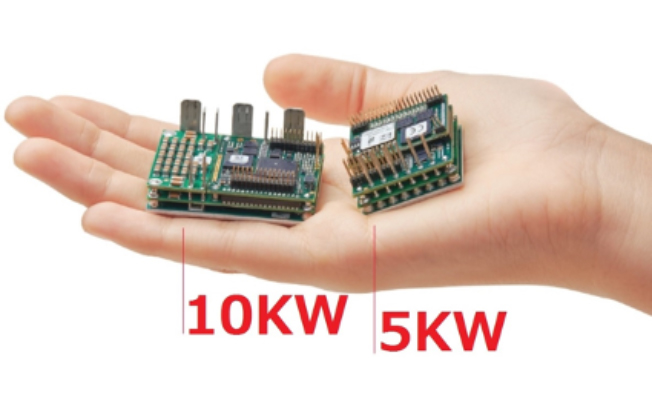
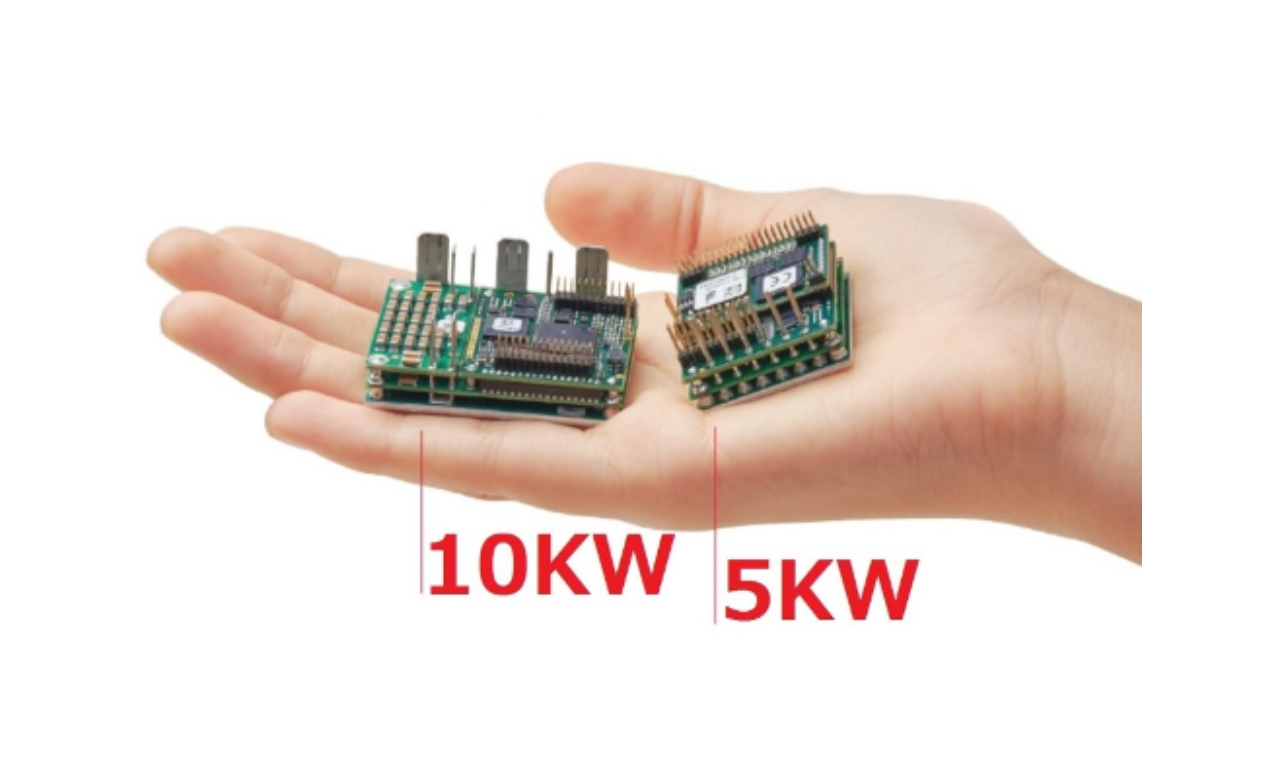
- 最も小さなドライバは30mm×35mm×18.8mmで重さわずか22.2グラム。最大80Adcの連続電流でモータをドライブ可能です。
- EtherCATもしくはCANOpenネットワークと接続可能です。
- チューニング(オート/マニュアル)、パラメータ設定、モニター、モーションプロファイル構築等用のソフトウエアが付属しています。
動画ではロボットアーム内に配置されたモータドライバがネットワークケーブルと電源ケーブルで接続され、
各軸同期してモータを駆動するイメージがご覧になれます。また付属するソフトウエアの機能イメージがご覧になれます。
ロボット関節に最適な超小型モータドライバGold Twitterシリーズ
3D Viewer
ロボットや一般産業用Gold Twitterは最も小さいモータドライバシリーズです。
ロボット関節アクチュエータや腕の中に組み込むには最適なモータドライバです。
Gold Twitterシリーズ仕様
- 大きさ:30mm×35mm×18.8mm、22.2g(基板実装タイプ)
I/Fコネクターボード付きタイプも用意されています。 - 単軸、EtherCAT/CANOpenでの多軸同期
- 電圧10-95VDC、20-194VDC
- パワー80W~5,000W
- 1A~80A連続までの連続電流 (型番で最適な値を選択)
市販のほとんどのフィードバックに対応 - ACサーボ、DCブラシレス、DCブラシ、リニア、ステッピングモータなど幅広いモータに対応
160A連続電流10KWのDouble Gold Twitterシリーズも用意されています。(47mm×37mm×19mm)
ドライバの内部構成
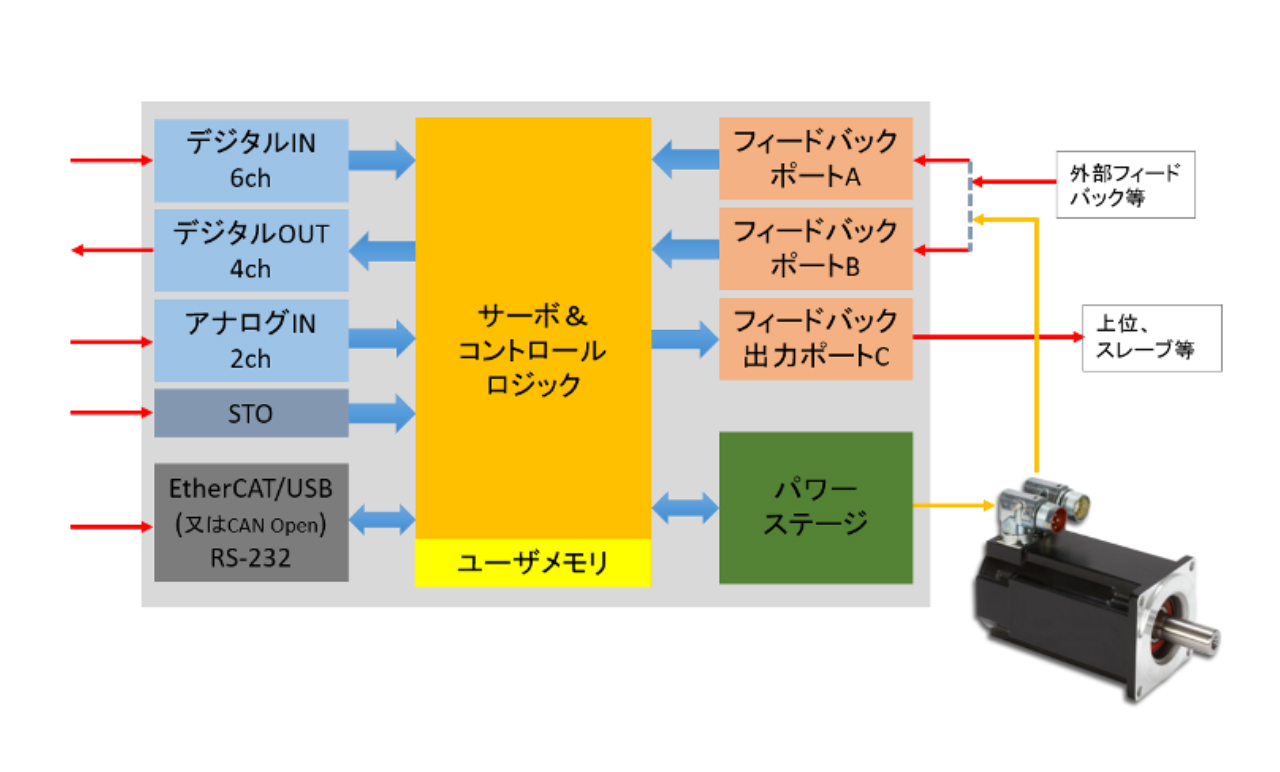
超小型モータドライバながらすべての機能ブロックを網羅しています。
- パワーステージ、サーボ&コントロール
- デジタルIn/Out、アナログIn、
- フィードバック用ポート2ポート:デュアルフィードバック対応
- 上位へのエンコーダ信号出力
- EherCAT/CanOpen I/F
- パソコンI/F:USB(EtherCAT時)またはRS-232(CANOpen時)
- STO
- ユーザメモリ:モーションプルファイルプログラミング用